Torque vectoring, braking regen and other unsung EV tech
VECTORING
Torque vectoring is fundamentally different in electric vehicles (EVs) compared to combustion supercars because it shifts from a mechanical process of redistributing existing power to a digital process of creating independent forces at each wheel.
In a combustion supercar (like a Ferrari F8 or Lamborghini Huracán), torque vectoring relies on a complex "mechanical orchestra" of clutches, gears, and hydraulic fluids.
However, even in EVs, not all "torque vectoring" is created equal, and there are four highly distinct implementations:
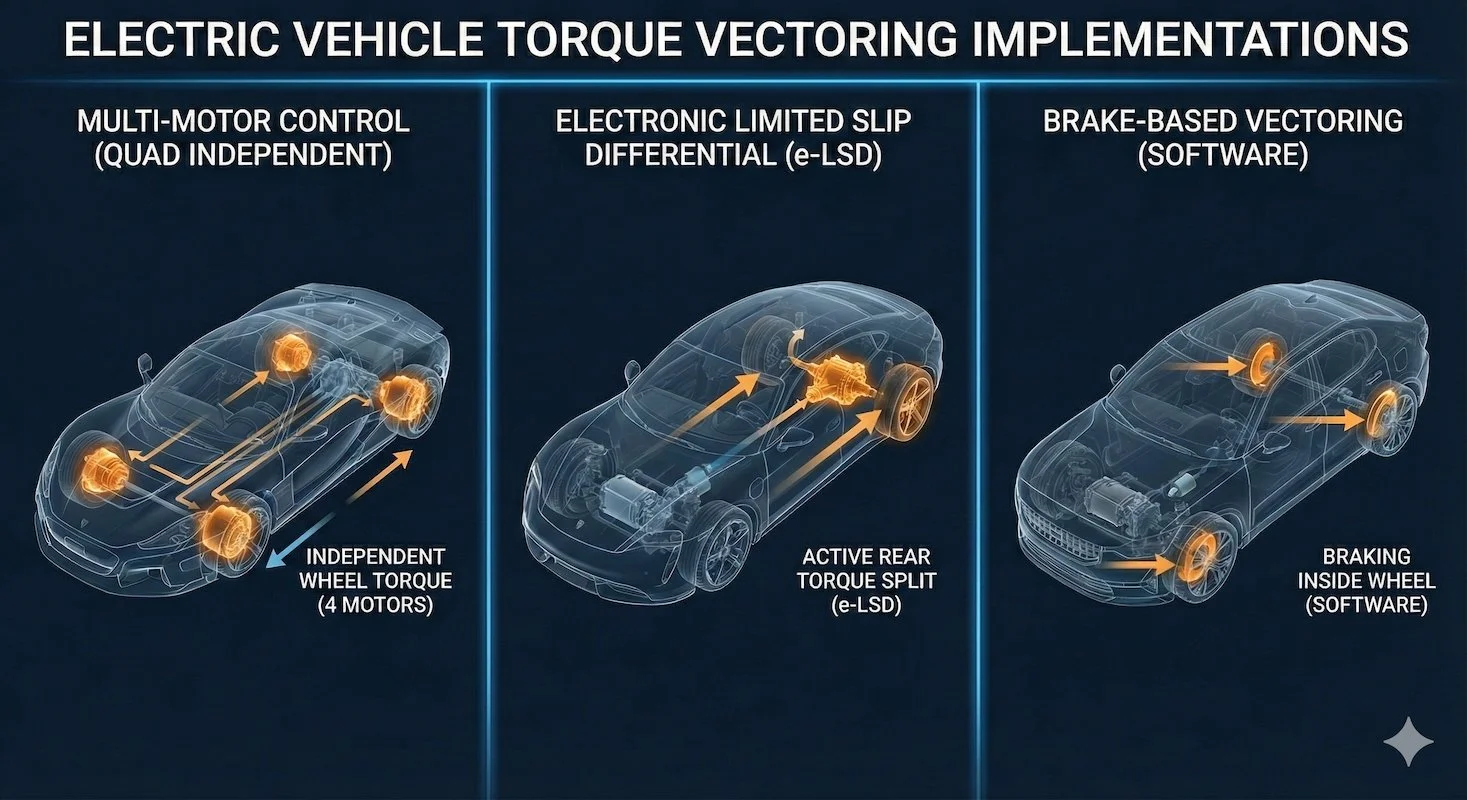
1. Multi-Motor Implementation (The Gold Standard)
This is the most advanced form. By placing independent motors on the same axle (usually the rear), the car can speed up the outside wheel while simultaneously slowing down (or even applying regenerative braking to) the inside wheel.
2. Mechanical/Electronic Differential (e-LSD)
These cars typically use two motors (one front, one rear) but include a specialized mechanical or electronic differential on the rear axle to shift power side-to-side.
-
Hyundai IONIQ 5 N: Uses a dual-motor setup with an Electronic Limited Slip Differential (e-LSD) on the rear axle. This allows it to mimic the feel of a rear-drive drift car while maintaining AWD traction.
-
Porsche Taycan (with PTV Plus): Uses Porsche Torque Vectoring Plus. It combines an electronically controlled rear differential lock with targeted braking interventions.
-
Audi RS e-tron GT: Similar to the Taycan, it uses a rear-axle differential lock to vary torque between the rear wheels.
3. Brake-Based Vectoring (Software-defined, the most common)
This is what the Jaguar I-PACE and many others use. It relies on the car's "brain" to apply the brakes to specific wheels. While effective for safety and "tucking" the nose into a corner, it is technically a subtractive process (it slows you down to help you turn).
-
Jaguar I-PACE: "Torque Vectoring by Braking" is standard.
-
BMW i4 M50 / iX M60: Uses "Actuator Contiguous Wheel Slip Limitation" (ARB). It’s an incredibly fast software-based system integrated directly into the motor controller rather than the separate DSC unit.
-
Tesla Model 3 / Y Performance: Uses "Track Mode" software to aggressively use the brakes to mimic a limited-slip diff.
-
Ford Mustang Mach-E GT: Uses brake-based vectoring to manage its high center of gravity.
-
Volkswagen ID.4 / ID.5 (GTX models): Uses "XDS+" electronic differential lock (brake-based).
-
Polestar 2 (Dual Motor): Primarily uses brake-based vectoring, unlike its larger sibling, the Polestar 3.
4. Mechanical Clutch Vectoring (The "Polestar" exception)
A unique middle ground where the car has two motors, but the rear motor is connected to two separate clutch packs rather than a standard differential.
-
Polestar 3: Uses a BorgWarner Twin-Clutch system on the rear axle. It can completely disconnect the rear motor for efficiency or use the clutches to send 100% of the rear torque to just one wheel.
REGEN
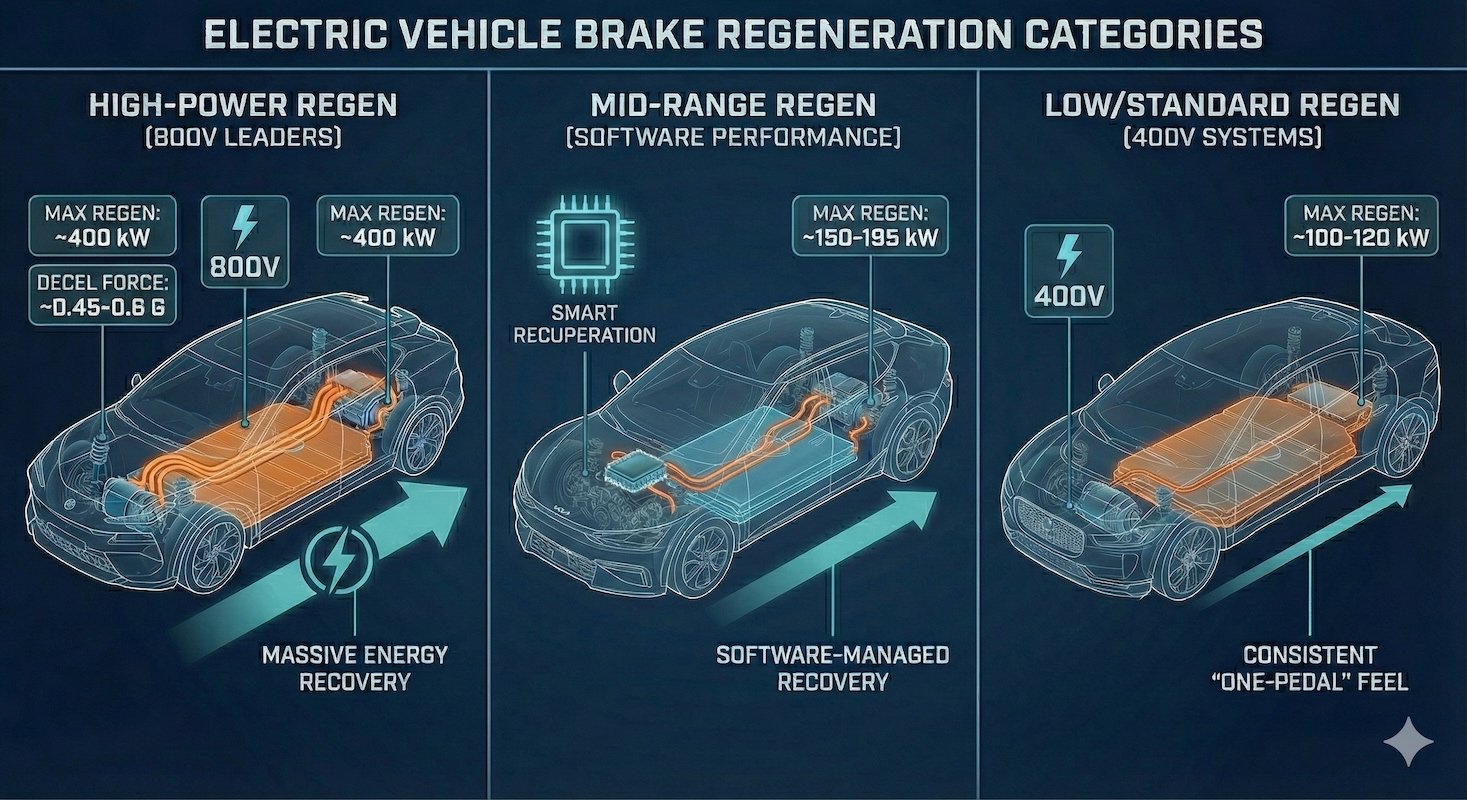
1. High-Power Recuperation (The Leaders)
These cars are equipped with 800V architectures and advanced cooling, allowing them to suck in massive amounts of power during braking.
2. Mid-Range Recuperation (Performance Software)
These cars have respectable regen but often rely on software "Track Modes" or blended braking to manage the energy flow.
3. Low/Standard Recuperation (The "Tesla" Approach)
Tesla and Jaguar favor a very consistent "One-Pedal" feel over raw peak kW numbers. While they feel strong at low speeds, their peak kW capacity is lower than the 800V rivals.
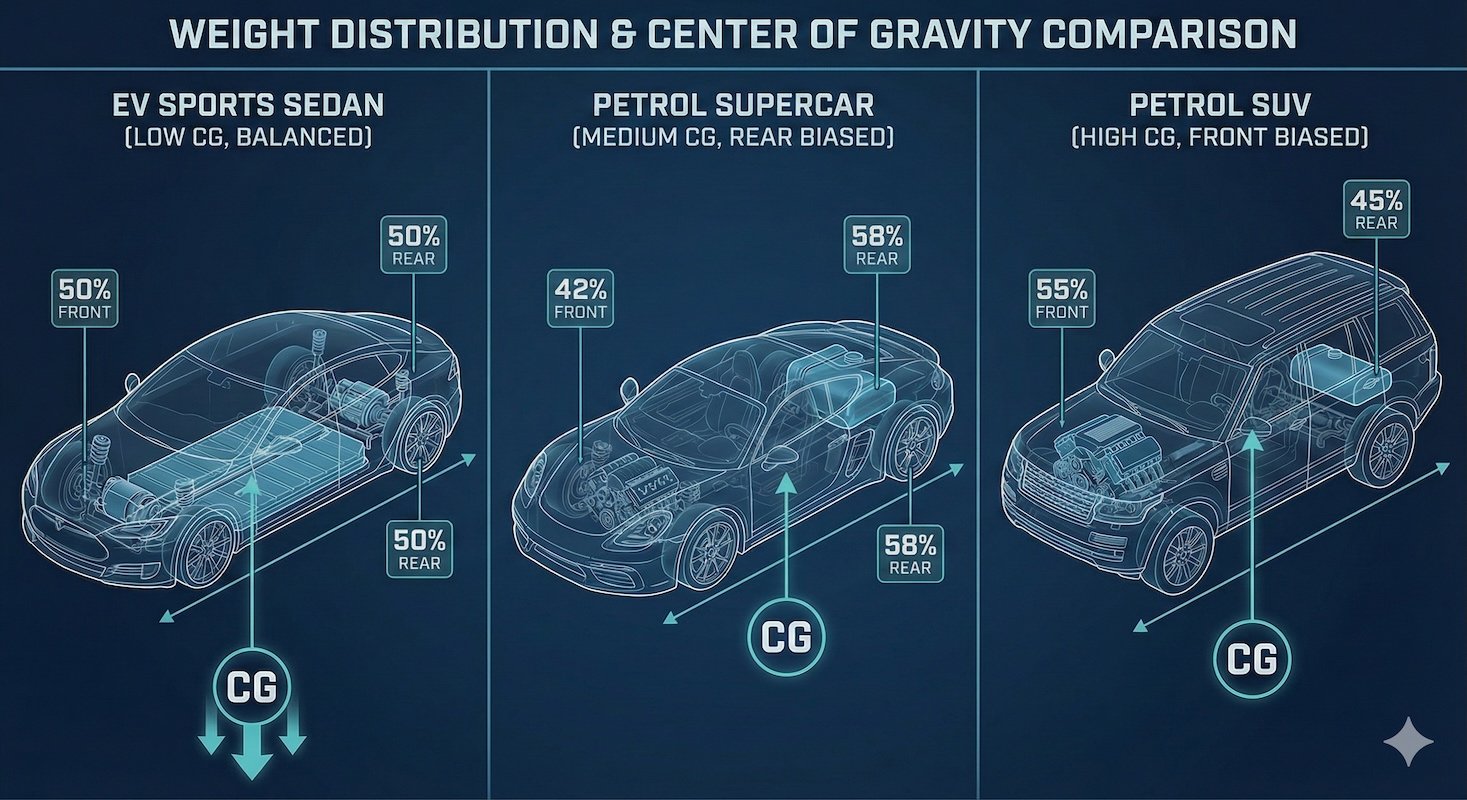
WEIGHT & CG
MODULATION
Manufacturers like Tesla and Hyundai (N Division) spend thousands of hours on throttle maps. Downwards throttle modulation is an EV-unique dynamic that involves sophisticated software and makes electric cars incredibly versatile compared to their mechanically limited petrol counterparts.
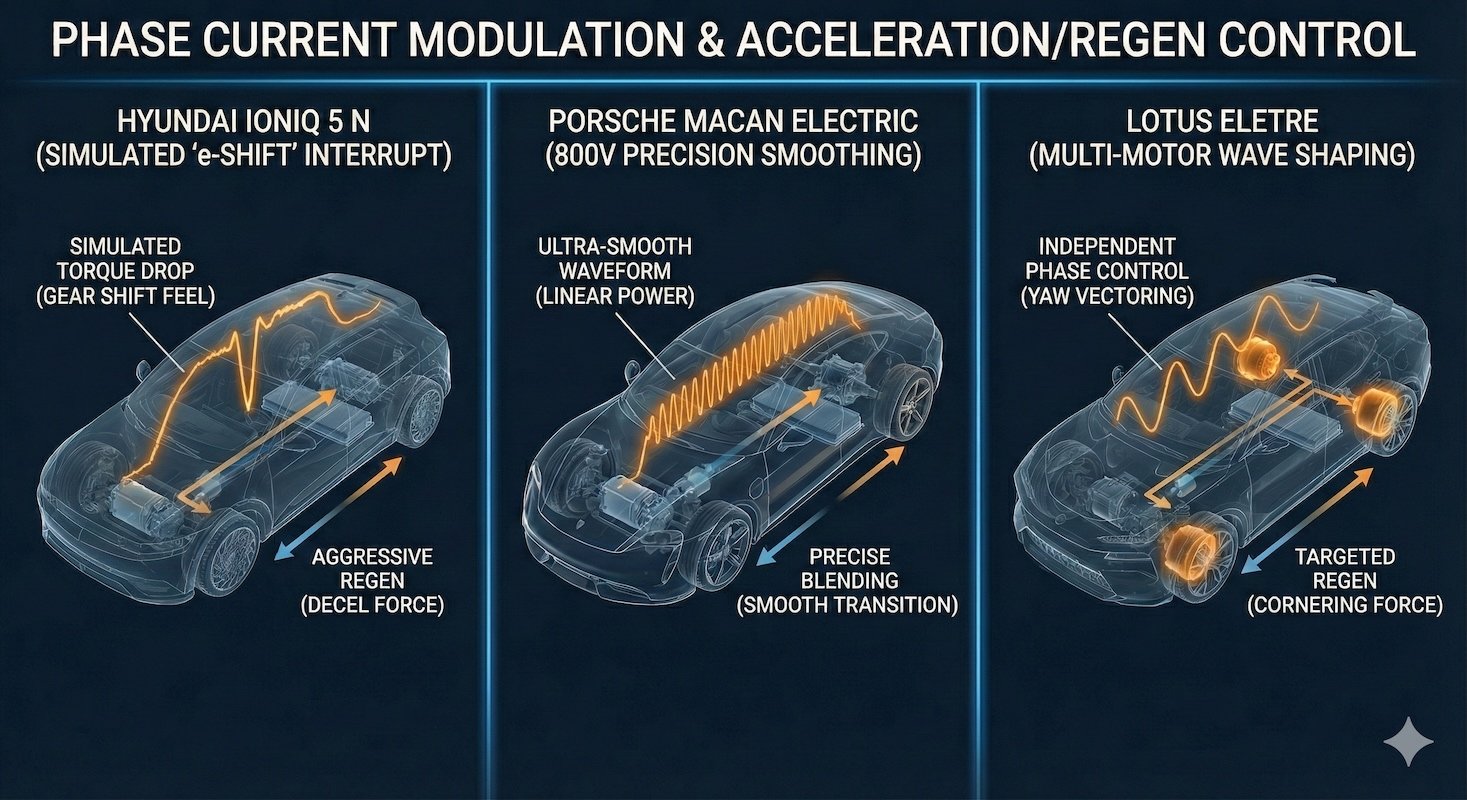
Phase Current Modulation is the digital "shaping" of electrical waves that allows an EV to transition from maximum propulsion to maximum energy recovery in less than a millisecond, providing the sensation of an instant, seamless gear change in both directions.
This modulation happens so fast (often at 10,000Hz) that the car can adjust the braking or accelerating force for every single inch of road surface, preventing skids before they even begin.
LATENCY & CD
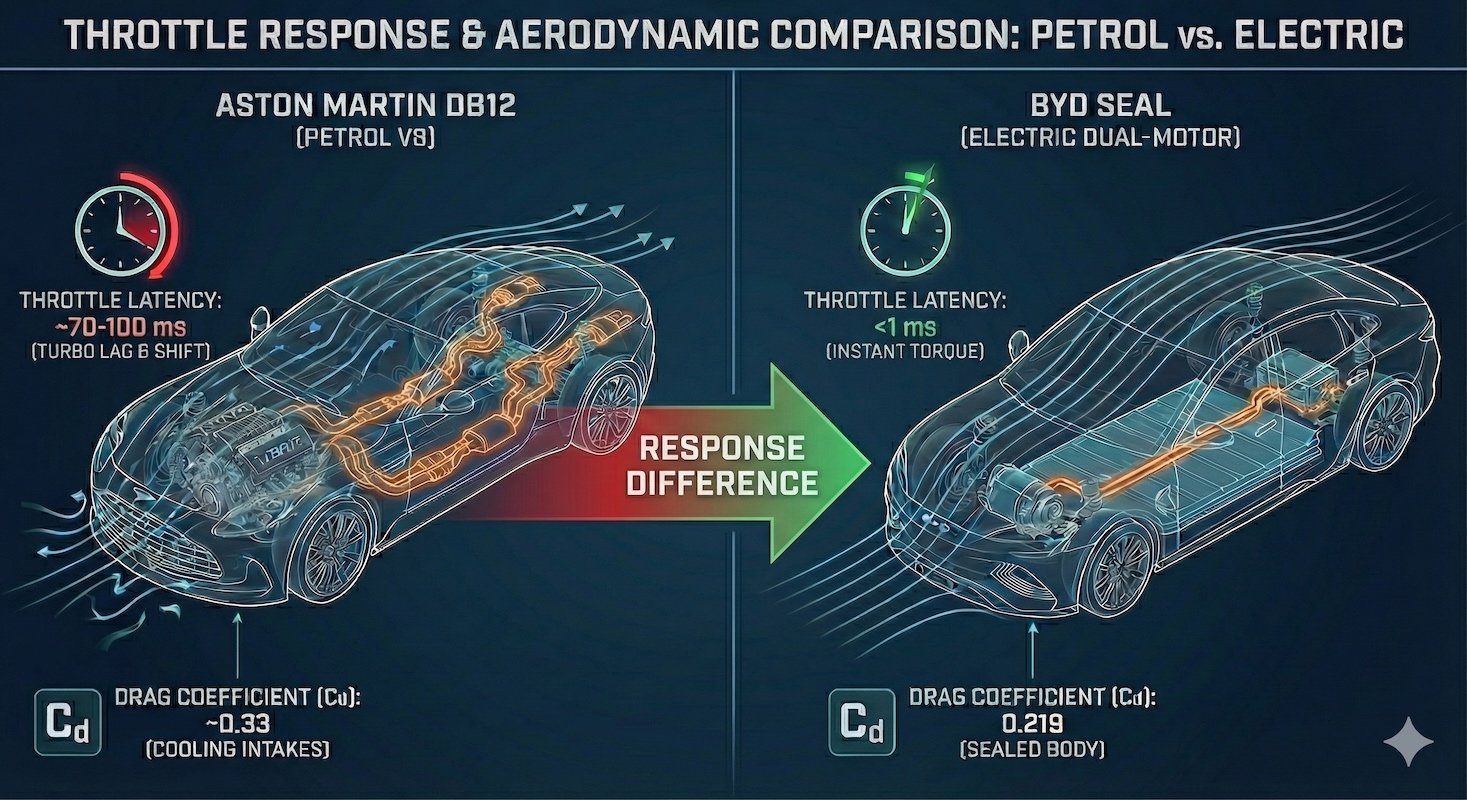
In conclusion, electric performance is defined by a low centre of gravity and balanced weight distribution, but true agility stems from advanced torque vectoring. While multi-motor hardware offers maximum precision, Phase Current Modulation enables "instant shifts" by reshaping magnetic fields in microseconds, allowing seamless transitions between propulsion and regenerative "downshifts." High aerodynamic efficiency (Cd) preserves this electrical energy for sustained high-speed acceleration by reducing wind resistance. Together, these digital systems transform EVs into telepathic performance machines, delivering a level of response and stability unattainable by traditional mechanical petrol drivetrains.